
Gimbal lock is a weird thing you get when a rotation system loses an axis of freedom. What is gimbal lock You see this whenever two of the rotation axes align, resulting in an axis-alignment problem that leaves you unable to move. They often encounter and learn the definition of gimbal lock through 3D tools, flight systems or robotics, because they experience that their motion is broken. This problem occurs quickly, and normally shows up at the time of layered turns when your software is not able to differentiate the angles out anymore. That’s when a system loses a degree of freedom of loss and your motion snaps into an unnatural pose.”
The trouble starts with Euler angles, which describe rotation as three distinct steps. One of your axis are used for each step. When the system shifts in a specific pattern some of the axes intersect and that is what leads to the lock. This affects animation, robots and aircraft as each field requires clean rotation mathematics. Lose reliable direction without stable rotation and also lose proper orientation tracking when moving.
What Exactly is Gimbal Lock
Gimbal lock occurs when two of the three rotation axes become overlapping, producing undesirable rigid motion and a loss of control. You feel this anytime when some model’s or object’s movement is awkward, but you are sure that everything is set correctly. The system attempts to twist, but one axis covers the other and the movement breaks down. It’s a hinge that’s rusted in one direction, and it hits you from creating fluid animation.
This problem also occurs in anything that actually uses Euler angles, since they are simply multiplicative rotation of particles. That stack of layers is sensitive to angle combinations that would make the alignment. You get more complex and the failrate exponentially increases, so very handsome artists and engineers use options like the quaternion rotation approach to safely get by. Axes aren’t stacked with quaternions, so we sidestep alignment issues and it avoids accumulating rotation issues.
Why the 3D Rotation Problem Occurs
The 3D rotation arise when a sequence of such rotations gives rise to coincident pair of axes. It is not able to distinguish these two systems, so it loses information. This implies that the model no longer has angular freedom in one direction. You see that most clearly in the case of a camera or character starting to twist and then suddenly snapping.
Another primary factor is order of rotation. What is gimbal lock The axes are read in order by each tool, so changing one affects the next. If the order is mismatched to your movement curve then gimbal lock occurs. That’s why animators try out different orders of rotation before they settle on final moves. And they will want to switch over to quaternions, because quats keep rotation as one smooth number instead of three overlapping angles.
Real-life Instances Demonstration Gimbal Lock
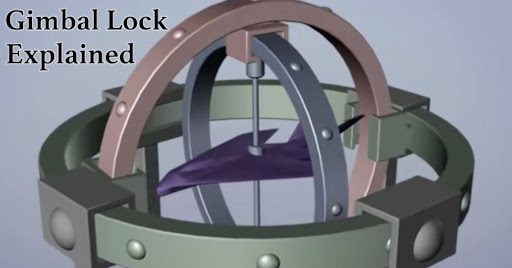
One such notable instance occurred in the testing of an early aerospace rotation system. Engineers had tracked direction with mechanical gimbals, but the axes were in line during a maneuver. The system got stuck and the vehicle no longer had stable tilts. This kind of problem caused engineers to redesign guidance systems that would counteract the alignment trap.
You also get it animation rigs. Creation of a mounted model Just tilting the head (with overlapping two axes) leads to unnatural twists in the neck. Many artists refer to this as the “snap moment,” where the model hops, without warning, into a crazy angle. The more the motion is dramatic, the higher will be the risk if considering Euler angles.
Why Gimbal Lock Happens, and What It Means for Motion
| Cause of Gimbal Lock | Effect on Rotation |
| Axis overlap | Creates a loss of a degree of freedom at a coarse scale, limiting movement in one direction. |
| Wrong rotation order | Leads to twisting or snapping motion, causing unnatural or jerky rotations in animations or systems. |
| Euler-based rotation | Produces unstable curves during turns, as sequential rotations stack and can collapse unexpectedly. |
| Complex animation paths | Results in unpredictable animation rotation issues, making motions look erratic or difficult to control. |
Why You Need To Care About Gimbal Lock In Animation
Most animators deal with rotation problems when their rigs fall apart as they rotate them. A shoulder, neck or camera rotates fluidly and then abruptly snaps into some perverse shape. This is due to the fact that the model rely on Euler angles they are bad at handling alignment. If the axes match, by angles the system folds in and rotation snaps in place.
Fixing these issues takes time. They are fed up and they try a different orders of rotation or change the controller to quaternions. This quaternion rotation solution considers the three rotation directions as a single step, so that we avoid alignment. This results in smooth curves even at the extremes of posing. It’s both a time-saver as well as a frustration-buster when doing the final animation.
Robotics Suffers From This Axis Alignment Problem Too
Robotic arms require clear rotation because they operate through-slick movements. When the axes align those arms become less precise and will sometimes stop mid-task. This problem emerges when a robot rotates by overlapping angles where the direction is lost. The more stoke depth is executed the higher is the risk for a collapse which might interfere with the work.
Engineers get around this by swapping systems. They separate axes using quaternions, or multi link paths. This separation makes each joint to be independent with weakening the robot for gimbal lock. This enhances the accuracy and lowers system error, because rotation will always be kept clean upon any angle movement.
Gimbal Lock and Flight Rotation Mechanisms
Aircraft would at one time use physically stacked mechanical gimbals to track direction. When the two gimbals were coincided then system was locked due to which reading error will generate. That incident was one of the most widely cited examples of what’s known as the alignment problem. Pilots required that readings be stable, so designers layered systems to prevent this cyclical.”
In the digital world of today, gimbal locks are no longer an issue for a flight tool. They follow full 3D rotation and do not use stacked lines such that axes will never line up in one direction. That’s what allows pilots to make sharp turns and keeps them stable on their journey. Such systems are in place because engineers know how damaging it can be for things to line up.
How Quaternions Fix The Gimbal Lock
The quaternion rotation solution will inhibit copy because quaternions represent the act of rotating as being one motion and not sequenced as three angles. This eliminates the pitfalls of Euler systems and prevents any judder on each turn. Whatever the speed, whatever the range of motion, however wide it is moving, this system never loses a degree of freedom.
Quaternions also make animation easier. They form curves that remain clean and natural. You will now never have to battle snapping or twisting in your shots, even when the camera is moved dramatically. That stability is why quaternions became the norm for modern software and roboticists: Imagine instead of a matrix data structure, we got model space misalignment free with our trinket!
How You Can Avoid Getting Gimbal Lock in Your Work
One way you could avoid gimbal lock is by changing your rotation order. Orders also change the stacking of orientation which can lower the risk of alignment. Many tools allow you size this easily and it will save time and movement. It also helps to do small changes in angle and make before a final move.
Switching to quaternions is the most robust solution. The vast majority of 3D applications including the software your engineer uses support quaternion-based animation and many people use it because of its accuracy. It creates strong curves and clean turns from any angle. This approach lets you have greater control, and thus, do the work more easily/quickly.
Adjust Your Rotation Order
The simplest way to avoid gimbal lock is by changing the order of rotation. Euler angles introduce rotations in a certain direction, so some orders are better than others. By trying a few different combinations, you can avoid the axes overlapping. That gives your animation or robot more degrees of movement.
Artists and engineers commonly try X-Y-Z, Z-Y-X, or even different orders of rotation. Every order gives a little different result for interaction between axis. You can get a decrease in axis alignment problems by ordering carefully. Small changes can avert big rotation issues down the road.
Use Quaternion Rotation
In quaternions rotation is actually together as a single movement, not range of different axes. This prevents axes from getting pulled onto one line. Quaternions solve this problem entirely–no loss of degree of freedom. It can be used for animations, robotics and navigation systems as well.
The quaternion rotation is widely used in 3D softwares & robotics platform. Transitioning between Euler angles and quaternions provides smooth, predictable transitions. This approach also lessens the demand for author interventions. It’s an easy way to avoid gimbal lock with complicated rotations.
Divide and Conquer: Factoring out Complex Rotations into Easier Sub-problems
Gross motions are prone to cause gimbal lock. Segmenting rotations this way distributes motion over time. This minimises the possibility of axis collimation. The system remains in a stable state after each stride.
This is particularly effective in robotics and animation. Rather than doing at 180 there and then, I do a number of smaller 180 changes. The movement is fluid and free from a jarring flip open. It also keeps you oriented properly in tracking through the experience.
Test and Monitor Rotation While in Motion
Being able to keep an eye on rotation as you are animated/roboticked should catch the gimbal lock early. Axes or curves often have tools to visualize software. Observing the way axes work can help avoid mistakes before they’re big problems.
Test flips to find out which rotations you can do as risky moves. Animating animators and engineering control system wizards can make adjustments to rigs too. It also automates the study of rotation math and how axes affect one another. Routine testing helps maintain safety and predictability in projects.
Mixing Euler Angles and Quaternions Use in moderation only
Some works use the Euler angles for simplicity. Quaternions can be combined with (rotation) matrices to avoid gimbal lock when doing fancy rotations. You can use euler angles for simple movement and quaternions for complex arcs.
This mix of methods is between convenience and stability. It stays gently curved in animation and straight and true for robot control. Combining both systems with some strategy you get less animation rotation problems and max freedom on all axes.
Why You Should Still Care About Gimbal Lock
Gimbal lock is still a problem with many types of technology. One of the places you encounter it is in animation tools, robotics, and navigation systems where Euler angles are still in use. Knowing this problem allows you to choose safer rotation methods before encountering issues. It also sort of teaches you how orientation systems function.
The problem shows you how sensitive bottom Bay two rotations can be. Rotating with the Why comes firstcap When you can properly understand how to order rotation and align the axis of rotation you build stronger animation paths and safer machine movement. This knowledge can prevent mistakes that would otherwise corrupt a project or ruin hardware. It is for that reason engineers and artists pay close attention to what causes a gimbal lock.
FAQs
What is gimbal lock, in layman’s terms?
It’s when two axes of rotation perfectly line up and cancel a degree of freedom. This results in a lock-up or unexpected snap.
Why would anyone care about gimbal lock in animation?
It interferes with graceful movement and makes abrupt turns. You have to straighten curves or change rotation systems.
Can quaternions remove gimbal lock?
Yes, quaternions prevent axis alignment. They maintain rotation while in the midst of intricate movements.
When do we see gimbal lock in action in the “real world”?
Aviation, robotics and CGI all get it. It can be induced by any Euler angles system.
How do I prevent gimbal lock?
Tweak the rotation order or spare us and enable quaternions. Both methods protect orientation.
How did NASA address gimbal lock issue?
Yes, Apollo guidance systems experienced it. Engineers worked around the problem.
Do we still have gimbal lock?
It does, you see it in a lot of 3D tools. Modern workflows just dance right around it smarter.
Conclusion
To this day, gimbal lock is one of the most important concepts in motion, animation and engineering. What is gimbal lock As there is no point in the system where two axes can be said to have oriented they way Ruby herself does, the system doesn’t have a fixed direction that arrests its natural spinning. This results in snapping, twisting and unpredictable movement that enters into the scene everything from character animation to robotics and the dynamics of aerospace. After you know what this failure looks like, you can cure it before it ruins your work.